MPS | 双极性步进电机如何练成“凌波微步”





在如今这个智能时代,步进电机由于其特有的开环位置控制性能在各行各业均有被应用到。各设备在步进电机转动的过程中,对它输出力矩的平滑性有一定的要求。
像云台球机,转动的稳定性将会影响到拍摄图像的质量。这一性能除了和步进电机本体的工艺相关以外,和步进电机的控制方式也是息息相关的。
今天我们所介绍的就是其中的一种控制方式 --- 细分控制。
那么步进电机要如何修炼成细分控制,来精进自己的武艺呢?

话说很久以前,电机届有这么一个电机名叫双极性步进电机(从电机控制出发的叫法)。除此之外,他又名两相四线步进电机(从电机本体出发的叫法),他天生奇特,内有乾坤。
8个定子上分别绕有两相双极性绕组(见图1),A相绕组绕线从定子1开始绕,依次绕到定子3,5,7上,值得注意的是定子1和5的绕线方向是一致的,定子3和7的绕线方向是一致的,两组绕线方向相反(见图2)。
B相绕组也是以同样的原理进行绕制。每个定子铁芯上带有五齿。
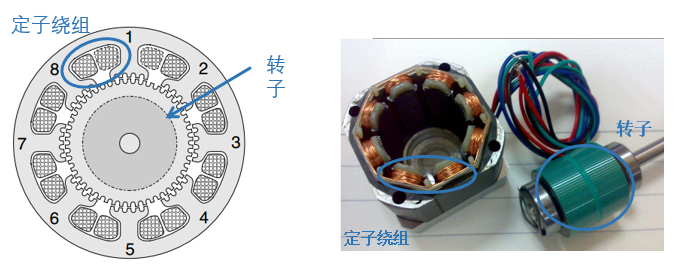
图1:双极性步进电机结构示意图
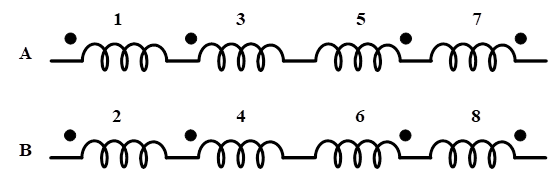
图2:极性步进电机绕组原理图
通常转子上贴有轴向充磁的永磁体(见图3),永磁体磁力线在电机本体内形成闭合,由于磁力线和磁阻效应,即使步进电机在不通电的情况下也会拥有一定的锁定力矩(见图4)。
转子上拥有50个齿,和定子齿轮相对起来,由于这样的齿数和相数结构,它拥有1.8度的步进角度(见图5)。步进角度:电气周期完成90度,步进电机转子前进的机械角度。
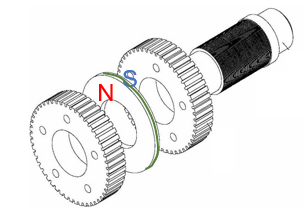
图3:转子结构示意图
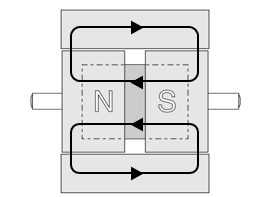
图4:侧面横截面图
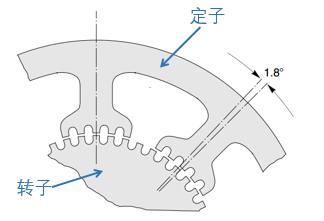
图5:1.8度步进角度结构示意图
为了方便讲解后续的控制方式,将复杂的结构图变成示意图(见图6)。可以认为步进电机的定子和转子都只有一个齿。它使得驱动和其它电机不同,叫做双全桥驱动。它的A相绕组接在第一个全桥驱动上,B相绕组接在第二个全桥驱动上(见图7)。
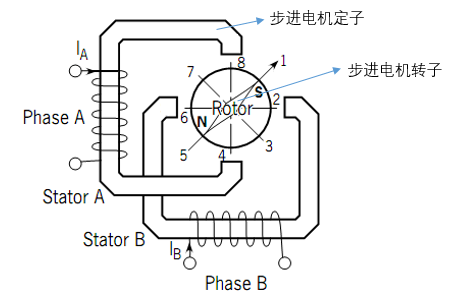
图6:双极性步进电机简化示意图
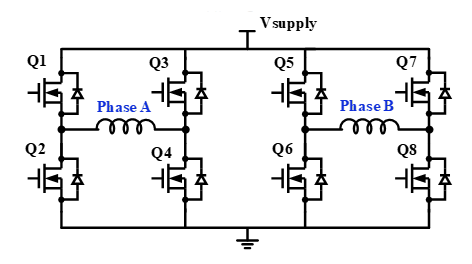
图7:双全桥驱动电路图
还不会细分控制的它在电机届还是默默无闻,为了能够在电机届闯出名堂,它刻苦练习,研究不同的控制方式,希望自己的旋转性能日后能在江湖上占得一席之地。
到目前为止,它已经掌握了三种控制方式,分别为单相步进,整步步进,半步步进。这三板斧使得虎虎生威,我们来详细看看。
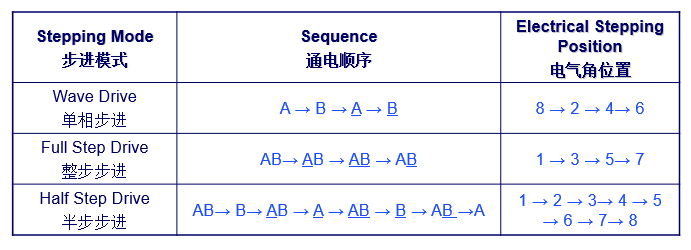
表1:步进模式表
当A相和B相按照单相步进的模式依次通电的时候,定子磁场会相应地进行变化,转子也会由于极性相吸,转动起来。AB相的通电顺序和转子的转动位置可以看表1的内容。当然看视频效果是最佳的!
简单描述以下单相步进的过程:
当A通电的时候,驱动电流由Q1流向Q4,此时定子A上端为N,下端为S,转子转到位置8。
接下来,B相通电。当B通电的时候,驱动电流由Q5流向Q8,此时定子B左端为S,右端为N,转子转到位置2。
接下来两个状态原理和上面类似,就不多啰嗦了,循环这一通电顺序,转子就开始转动起来。
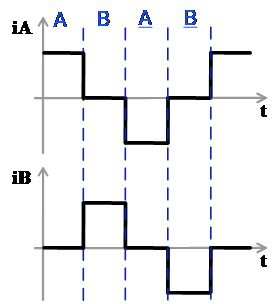
图8:单相步进AB相电流波形图
和单相步进不同的是,整步步进式AB绕组会同时进行通电。并且也是有四个对应的通电方式和转子电气位置,只不过位置空间在电气空间上和单相步进不一样。根据整部的通电顺序,转子也是能转动起来。具体的过程就不赘述了,想要生动的效果要记得看视频!
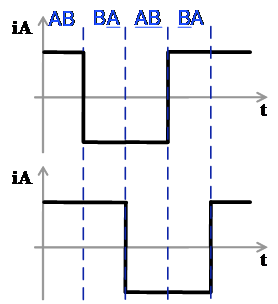
图9:整步步进AB相电流波形图
仔细看过表1的读者们肯定已经发现了步进电机步进的秘密!
这个最后一板斧就是将上面两种控制方式进行融合,就有了半步控制,它的电气角度位置更多,电流波形更加细致,转动更加平滑。
但步进电机想靠这三板斧在高手如林的电机届闯出名堂,还远远不够,因此它需要继续苦心修炼。
那么,到底什么是细分控制呢?
细分控制又是怎么对双全桥驱动进行控制的呢?
本期电源小课堂让我们来一探究竟:
在上集我们知道,半步步进模式是组合了单相步进和整步步进,从而获得了更多的电气角位置。
那么如果想要获得更多更细的步进电气角度,是不是加入更多的角度位置就可以实现了?其实这就是细分控制的想法。
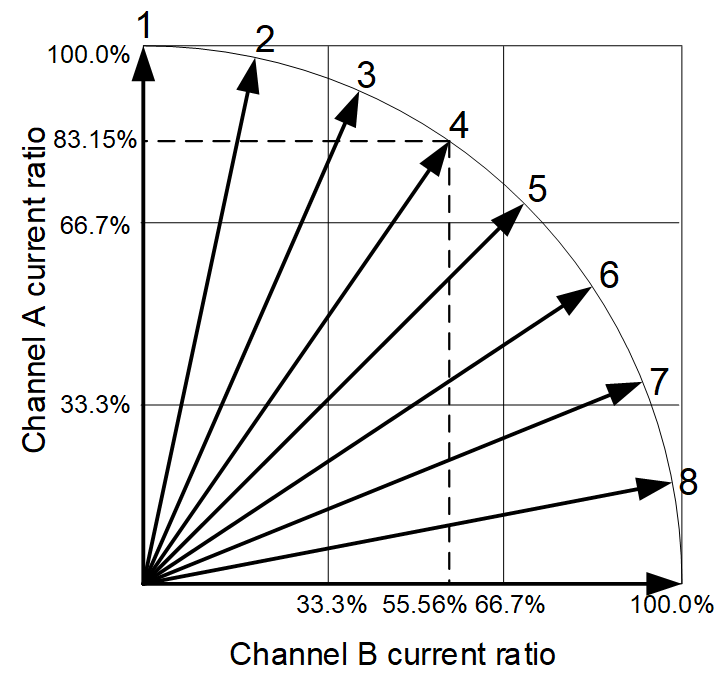
图1:八细分电气角
这是细分控制中的八细分的例子(见图1),图中可以看到单相步进AàB这一个90度电气角度被等分成了8份,也就是有8个电流位置存在,每个位置的电流都是由A相绕组和B相绕组的电流在空间上矢量合成的,合成的幅值大小为单位1。我们将每个位置的电流分别投影到A相和B相上会获得右边的控制数值表(见表1)。
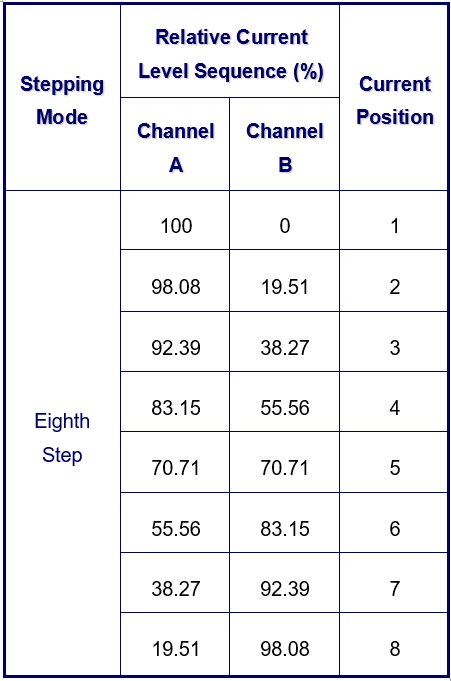
表1:八细分控制数值表
如果我们需要这个位置的电流,就按照数值表中对应的数值来控制A相和B相的电流,就能实现这一角度位置的电流控制,被控制的A相和B相电流就能合成对应角度的电流矢量。
在八细分的控制下,步进电机的电流会变成类正弦(见图2),A相和B相电流就像走台阶一样,按照每一个合成电流大小的数值走着。如果细分数更多,那么电流波形就更加趋近于正弦。正弦的电流波形将会减小电机输出力矩的波动,在空间上会形成圆形旋转的磁场,步进电机转动的稳定性就会增强。
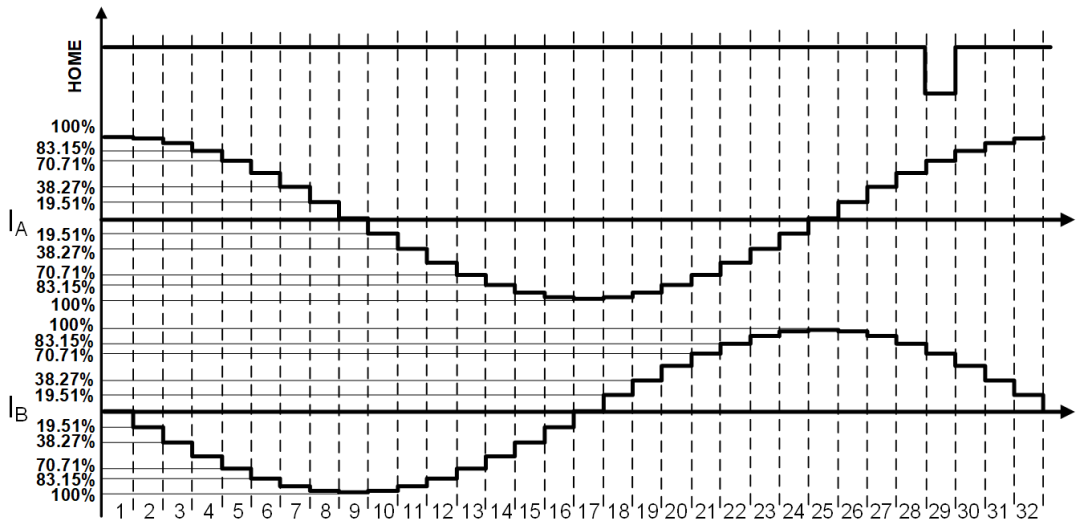
图2:八细分控制下的A相B相电流波形
那么要如何进行每个电流台阶大小的调节,将电流稳定在这个数值上呢?
通常为了将电流稳定在对应的数值上,会采用 slow decay 和 fast decay 的控制方法,我们取A相其中一段“台阶”来详细看看。图3为A相的电流调节波形图,这是通过控制A相的全桥驱动的四个管子的通断来实现(见图4)。
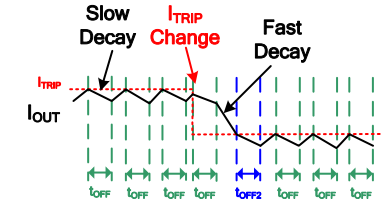
图3:A相电流调节波形图
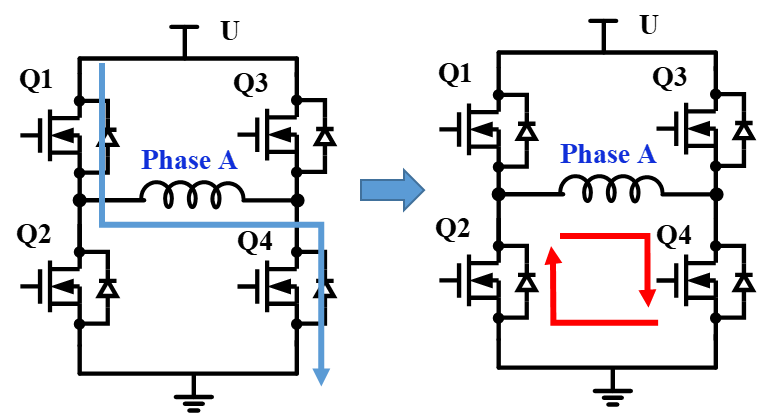
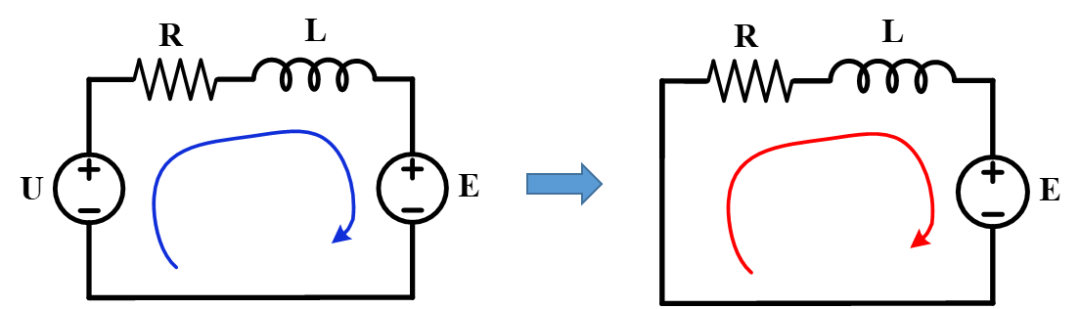
图4:A相全桥驱动慢衰 slow decay 过程
当Q1和Q4开通的时候,供电电压U加在A相绕组上,电流开始上升,对应的等效电路中,R和L为等效阻抗,E为转子旋转时,A相绕组切割磁感线产生的反向电动势,反电动势反作用在绕组回路上。一旦电流值达到所设定的“台阶”值时,就需要去减小电流,不然电流会继续增加下去,这将会超过这个“台阶”所设定的值。这个时候就需要用到慢衰 slow decay。
关闭Q1,并打开Q2(忽略死区时间),此时相当于A相绕组被短路,由于电机感性负载,电流方向不会突变,电流在两个下管形成环流,只有反电动势E作用在回路上,电流受到反向的压降-E并开始下降。如果忽略掉阻值带来的压降,我们可以认为此时电流以-E/L的速度下降。
当电流下降一段时间后,关闭Q2开启Q1,重新让电流开始上升,如此循环,电流就能稳定在这个“台阶”所设定的值上。
那么当电流要进入下一个下降“台阶”的时候,电流需要进一步下降,如果电流下降的速度不够快,就需要比较长的时间,那么慢衰的速度可能是不够,这就需要用到快衰 fast decay 了。(见图5)
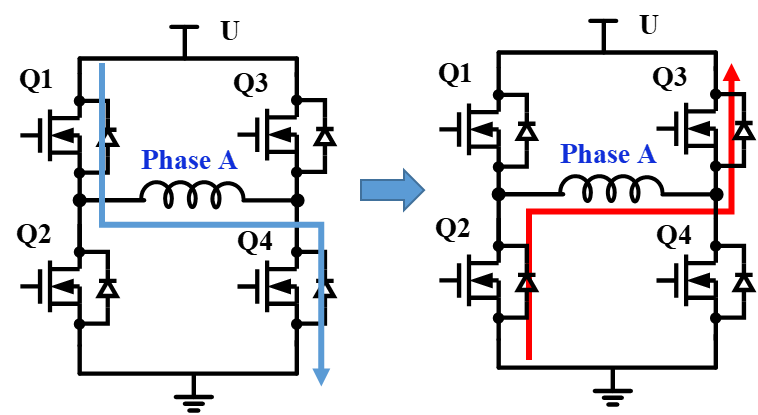
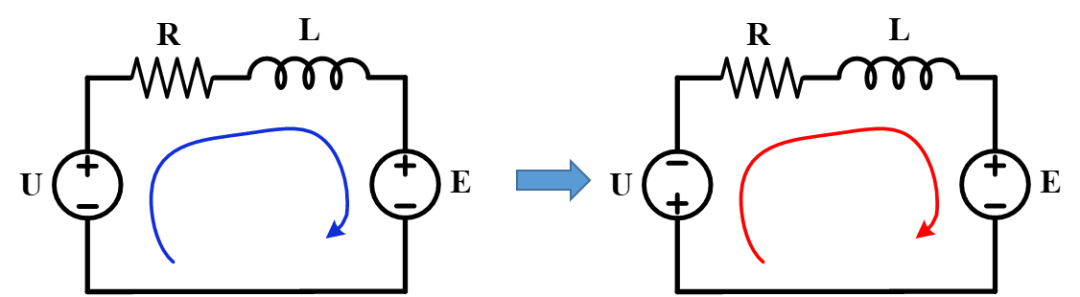
图5:A相全桥驱动快衰 fast decay 过程
快衰是在关闭Q1和Q4后,打开Q2和Q3(忽略死区时间),此时供电电压反向加在A相绕组上,再叠加上同样反向加在绕组上的反电动势E,电流同样因为感性负载不会突变,电流从Q2流向Q3,此时电流将以-(E+U)/L的速度下降,所以电流会比慢衰下降得更快。
当电流降到下一个“台阶”的设定值后,电流调节就可以重新从快衰变成慢衰。这样子合理地去运用慢衰和快衰,被控制的电流可以做到响应既快,纹波又小。我们来看看只用快衰,慢衰,以及结合快衰和慢衰的电流波形。其中,绿色波形为电流波形。(见图6)
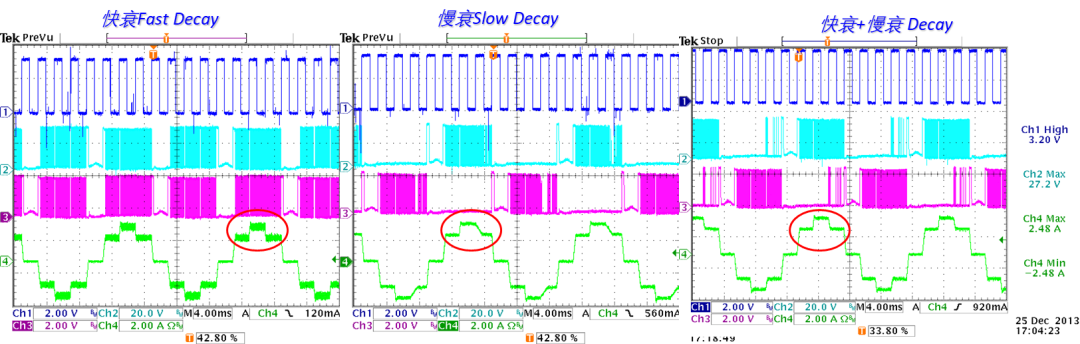
图6:不同电流控制下的电流波形图
可以看到只有快衰 fast decay,由于快速下降的电流,当电流需要稳定在平台上的电流纹波会较大;只有慢衰 slow decay,由于较慢的下降速度,当电流需要下到下一个台阶时间较长,导致波形有点畸变。
结合快衰 fast decay 和慢衰 slow decay,在稳定住所设定的台阶值的时候用慢衰 slow decay,在需要电流快速下降到下一个台阶值的时候用快衰 fast decay,电流将会被控制得更好。
这样一来,步进电输出的力矩平滑性也会更好。步进电机的转动振动更小,噪声更小。