村田 | 防止服务机器人“误动作”?噪声对策很重要!




01 什么是服务机器人?
机器人大致可以分为工业机器人和服务机器人。与工厂等地使用的工业机器人不同,服务机器人是用于辅助人们的日常生活的机器人。
02 与一般家电的区别
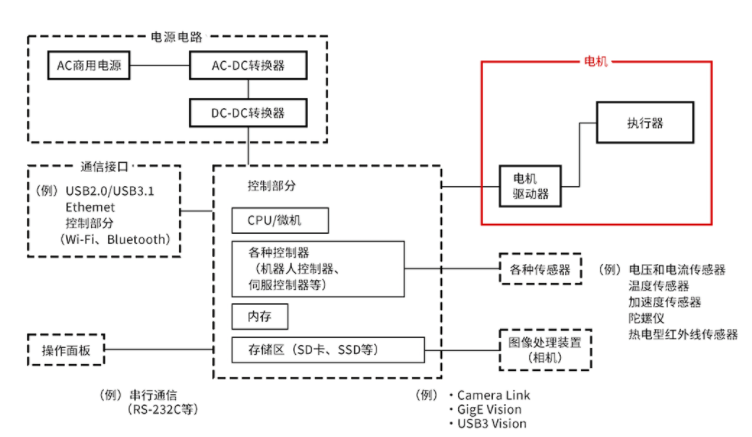
机器人框图
03 服务机器人的噪声问题
服务机器人中可能存在的噪声问题有2个。
首先,电机驱动会产生放射噪声,产生对周边设备造成不良影响的发射问题。由于服务机器人有时会在家庭中使用,因此对噪声抑制要求很严格。
发射问题:电机驱动会产生放射噪声,影响其他设备。
其次,还有抗扰度问题,即服务机器人会因外部传入的噪声而发生误动作,对人体造成伤害。由于LTE、Wi-Fi等无线通信电波在家里传播,这些电波即成为外部噪声,如果进入机器人内部的电子电路,则机器人可能会发生误动作,对人体造成伤害,因此,预计将需要高水平的抗扰度耐性。

抗扰度问题:外界噪音引起误动作,对人体造成伤害。
本篇将针对每个噪声问题依次介绍噪声对策。
04 噪声状况确认及对策研究
我们分别确认了发射和抗扰度的现状,并研究了噪声对策。
05 针对发射(放射噪声)的噪声对策
首先,确认了发射噪声的状况,测量已上市服务机器人的放射噪声。
测量系统参考了CISPR16-2-3
噪声允许值参考了通用标准IEC61000-6-3(住宅和商业环境)
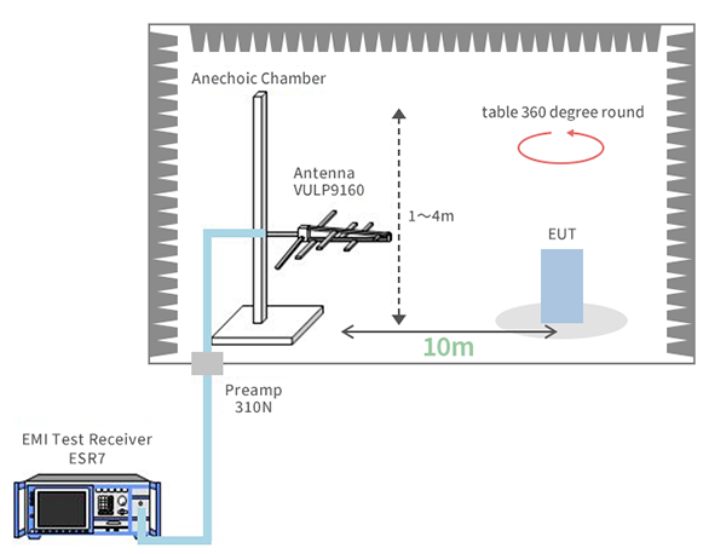
放射噪声测量系统
06 噪声对策实施前的放射噪声情况(初始状态)
确认噪声在30MHz-200MHz频段内超过了IEC61000-6-3的标准值。该频段内的噪声已成为很多服务机器人的问题。
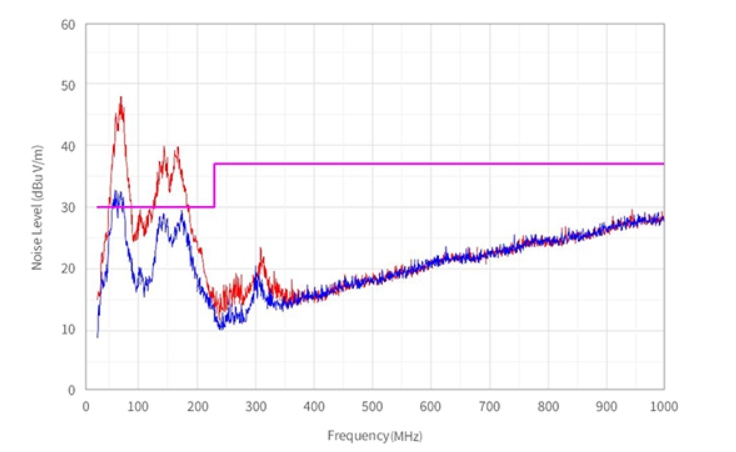
噪声对策实施前的放射噪声情况(初始状态)
07 发射(放射噪声)问题的产生机制
我们研究了噪声源及其传播路径。
本次测试的设备使用了无刷电机。为了驱动无刷电机而使用了驱动电路,一般采用三相PWM控制电路作为无刷电机的驱动电路。这种控制电路每相使用2个开关元件,总共使用了6个开关元件,这些元件会产生开关噪声。
这种开关噪声会传导到电缆上,但由于机器人中使用的电缆通常是未屏蔽的绝缘电缆,因此噪声会从电缆放射到外部。
此外,由于噪声也会传导到电机内部的线圈,因此从电机本身也会放射噪声。
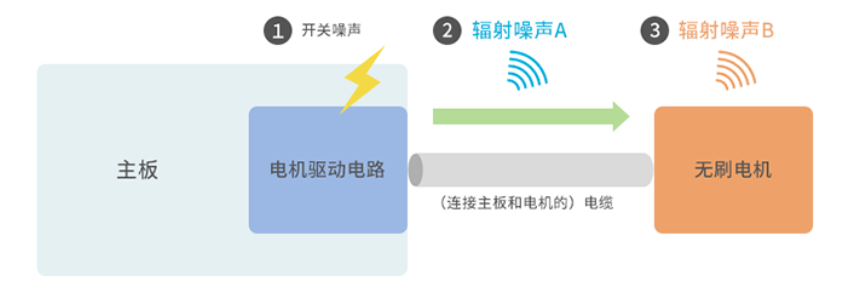
推测的噪声产生机制
驱动电路的开关元件会产生开关噪声
开关噪声传导至电缆,并从电缆放射噪声(放射噪声A)
开关噪声传导至无刷电机的线圈,从电机放射噪声(放射噪声B)
发射问题:电机驱动会产生放射噪声,影响其他设备; 抗扰度问题:外界噪音引起误动作,对人体造成伤害。
08 发射(放射噪声)的噪声对策
电机驱动电路中产生的开关噪声传导至电缆并从电缆放射或从电机本身放射,因此,应防止噪声传导至电缆。
因此,在电缆连接器附近插入噪声滤波器。
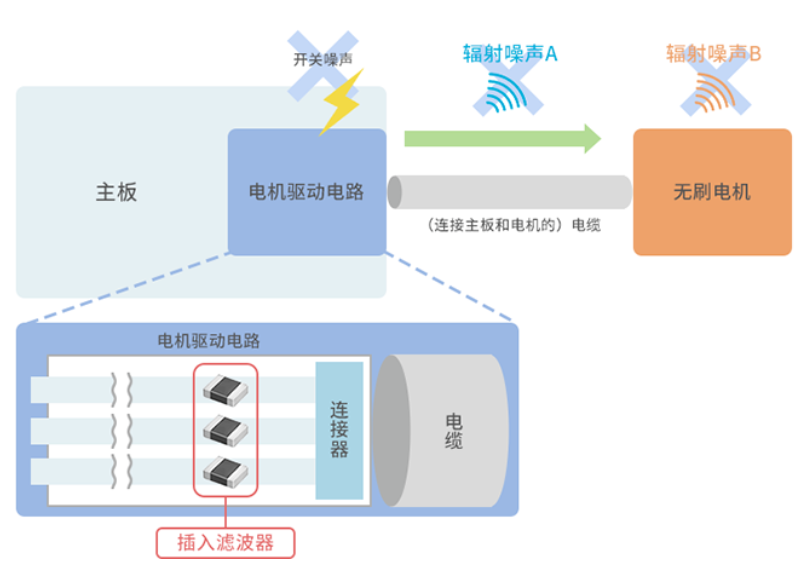
插入噪声滤波器
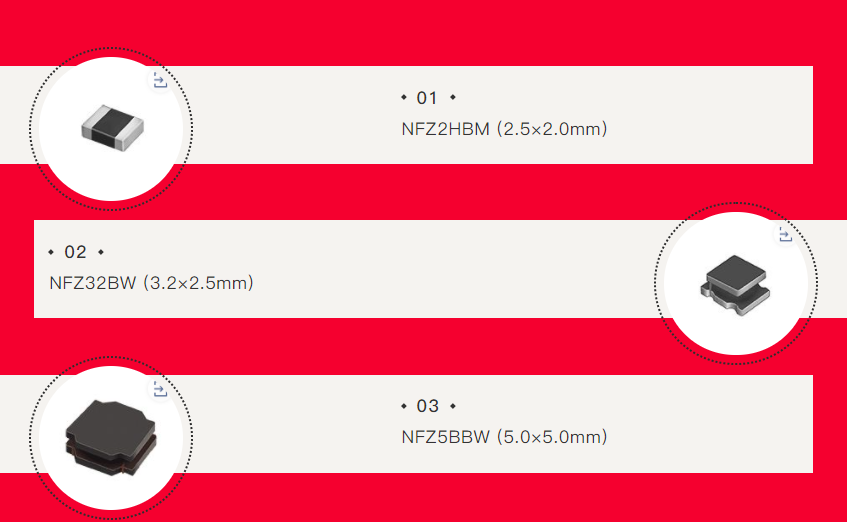
由于噪声频率在30MHz至200MHz(某些情况下为300MHz)的频段内,因此选择在该频段有效的零件。可选择NFZ2HBM、NFZ32BW、NFZ5BBW等NFZ系列和BLT5BPT系列。
此外,如果电机因某种原因而锁定,可能会流过瞬时尖峰电流,因此最好选择额定电流为正常电流的3至5倍的零件。这次使用的是NFZ2HBM。
荐 村田推荐
此次村田介绍的滤波器包括NFZ系列三个型号的噪声滤波器,以及铁氧体磁珠BLT5BPT系列。
村田NFZ系列噪声滤波器
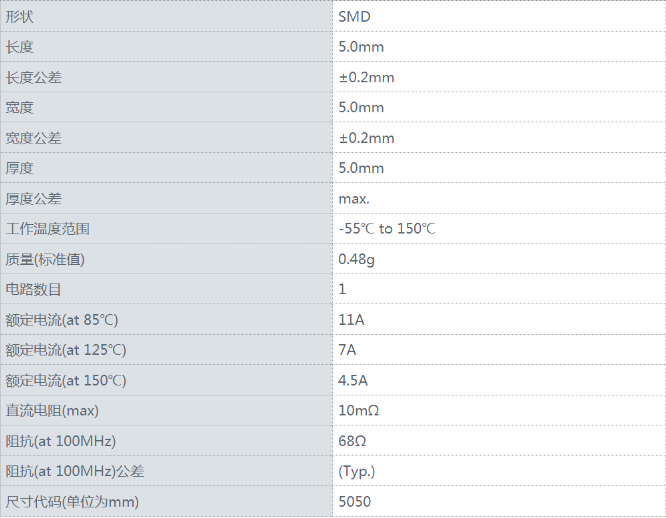
铁氧体磁珠BLT5BPT系列,支持最大为11A的大电流。最高工作温度为150°C,可在任何地方使用。
村田推荐铁氧磁珠

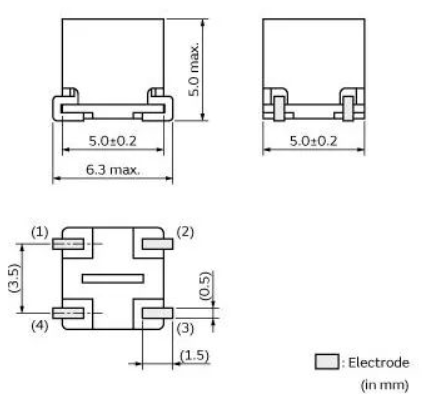
BLT5BPT系列状及规格
09 发射(放射噪声)对策的效果
将NFZ2HBM4R4SN10安装在安装电缆的连接器附近时,可以将噪声抑制在标准值以下,并且可以确保5dB或更大的裕度。
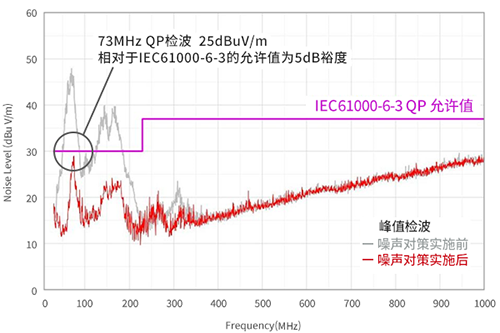
水平偏振波
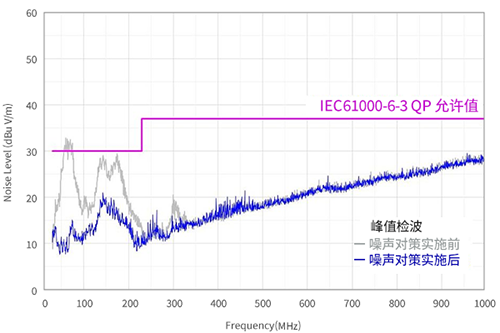
垂直偏振波
10 关于抗扰度(近距离照射抗扰度)
下面进行无线通信电波近距离照射抗扰度试验。由于此试验没有官方噪声标准,因此我们构建了自己的测量系统。
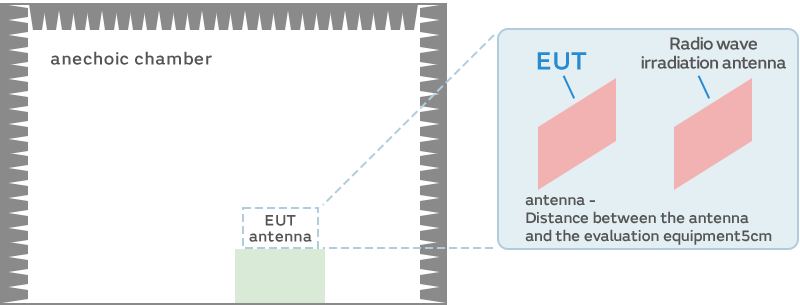
近距离照射抗扰度测量系统
假定外部电波为LTE和WiFi通信电波,在相应的700MHz-2600MHz频段每隔100MHz以10MHz的步长放射电波,并通过电机转速和电流消耗来确认电机的行为是否发生变化。
测试条件
01 照射的电波频段
700MHz-2600MHz(假定外部电波为处于此频段的LTE和无线LAN通信电波)
每隔100MHz以10MHz的步长进行抗扰度测试
02 照射的电场强度
10V/m以上,每个频率照射5秒,脉冲调制0.2kHz,Duty50%。
03 接近距离:5cm
使用宽带套筒天线(型号为NKU07M32G,由NoiseKen制造)。
电机连续运转1个周期(正转1.5秒,反转1.5秒)。
监控主IC内部的计数器以测量电机转速和电机电流消耗。
下图显示电机正常运行时的电机转速和电流波形。查看转速可以发现每隔1.5秒就重复一次正转和反转。另一方面,看电流波形则会发现有特征性变化。切换电机旋转方向的瞬间流过大电流(本例中为605mA),之后稳定为小电流(100mA)。
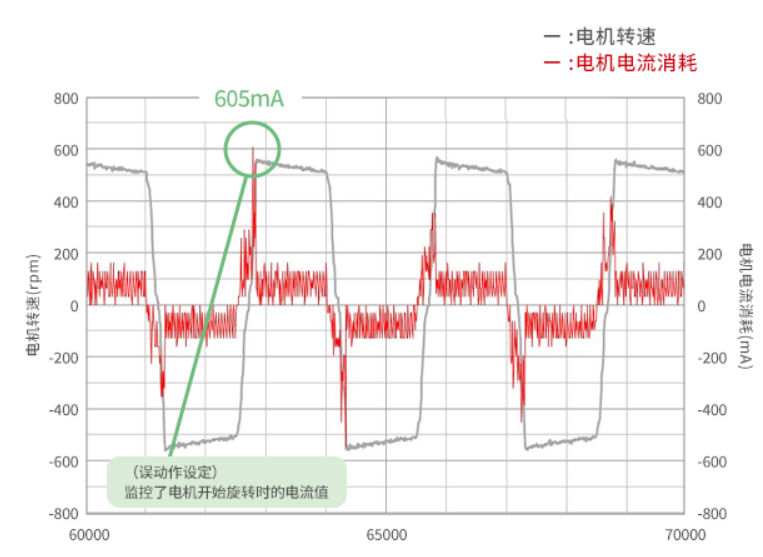
进行抗扰度试验时,进行该反转时的电流最大值增加。由此可知它受到了外部噪声的影响。此外,该变化量的影响程度根据所照射的电波的频率而有差异。
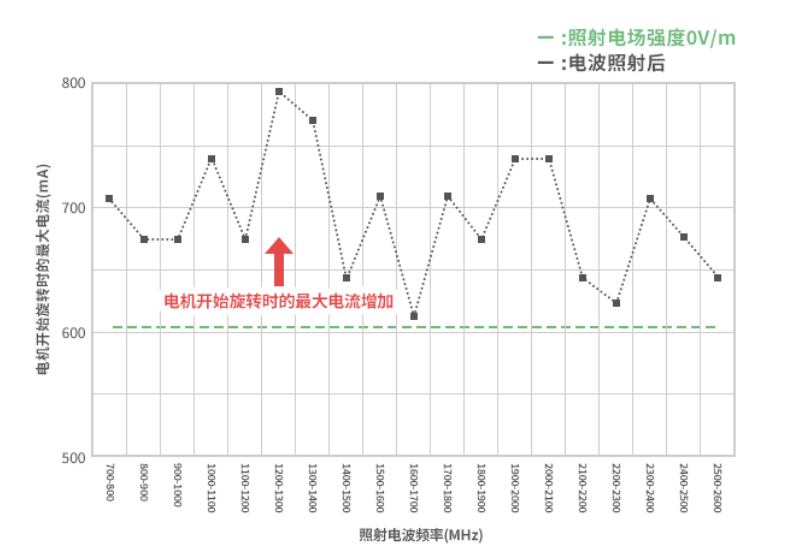
有电波照射
11 抗扰度问题发生的机制及对策
我们推测此问题按照以下机制发生。
照射外部噪声
共模(噪声)叠加
在主IC内部,部分共模被转换为差模(噪声叠加在反馈信号上)
主IC错误识别电机的实际运行状态并流过过剩的电流
电机旋转所不需要的电流被作为热量消耗掉(浪费的能量)
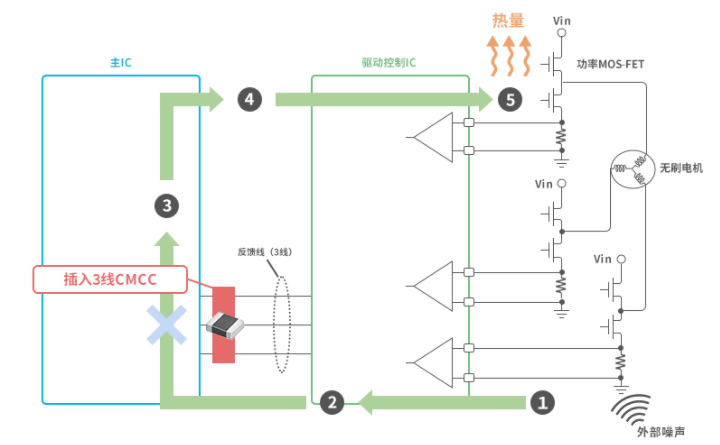
当外部电波作为噪声照射时,噪声与基板导线等通过共模相结合。电机的运行由安装在基板上的主IC控制,电机和主IC之间由反馈电路构成,因此共模结合后的噪声叠加在反馈信号上。
混有噪声的反馈信号输入到主IC后,部分共模噪声会在IC内部转换为差模。主IC接收到混入了噪声的错误反馈值后,会输出错误的控制信号。
在本例中,流过的电流超过了电机旋转所需要的电流,因此多余的电流被作为无用的能源浪费掉了。
在这种情况下,从输入到主IC的反馈信号中去除共模分量的噪声是有效的。由于三相电机的反馈信号由3线组成,因此使用了3线相结合的共模扼流线圈(CMCC)。
12 抗扰度对策的效果
应用共模扼流线圈后进行相同的测试时发现,流过电机的最大电流的增加量显著减小。
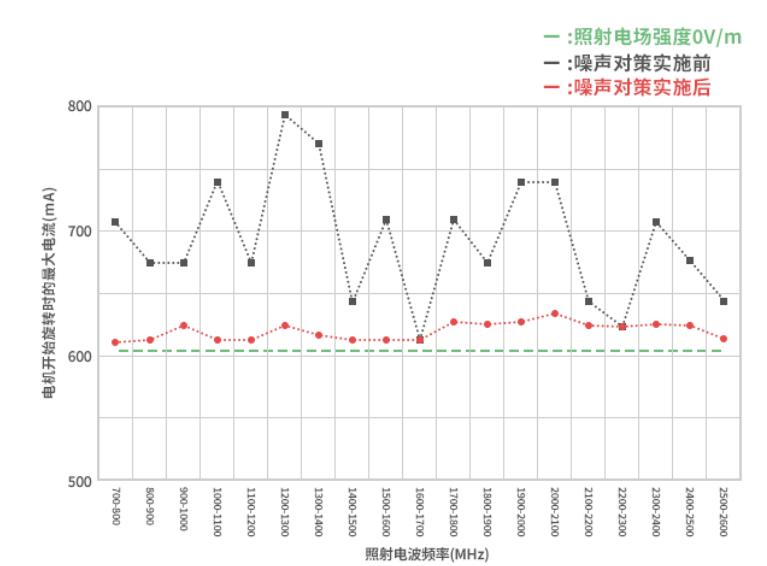
通过这种方法,即使有外部噪声进入,也能防止电机控制受到干扰。此外,由于没有不必要的电流流动,因此可以防止电池容量的浪费。
13 总 结
由于服务机器人用于家庭环境,因此噪声对策很重要。
在发射问题中,人们关注的是由电机驱动器产生的开关噪声放射引起的问题。
在抗扰度问题中,外来噪声会进入驱动器的反馈信号线,并将错误的控制信号传输到电机,导致其可能产生误动作。
1. 作为发射对策,请在连接器附近安装噪声滤波器,连接器附近是连接到驱动器IC的电缆的安装部分。
村田推荐滤波器(用于发射对策)包括:噪声滤波器NFZ系列——一款可以应对大电流的小型噪声滤波器。可以根据噪声的频率选择常数:NFZ2HBM(2.5×2.0mm),NFZ32BW(3.2×2.5mm),NFZ5BBW(5.0×5.0mm);以及铁氧体磁珠BLT5BPT系列——支持最大为11A的大电流,最高工作温度为150°C,可在任何地方使用。
2. 作为抗扰度措施,在反馈信号线上使用共模扼流圈。由于反馈信号线为3线构成,因此共模扼流线圈也选择3线型。
村田推荐的滤波器(用于抗扰度对策):共模扼流线圈3线CMCC,读者可以根据噪声的频率选择商品。